By Strada Imaging
Introduction

Strada Imaging has recently released Pavo CVI, adding vehicle-based road inspection capability to their Pavo product line. An important aspect of road maintenance is coarse visual inspection (CVI), as known in the UK, or windshield surveys, as known in the US, that details road conditions at the network level. During such a survey, an inspector sits next to the driver and uses a direct data capture device (DCD) mounted to the vehicle to input observations. Pavo CVI comes with its own DCD and easy-to-use mobile application software. The Pavo product family was originally designed for road inspectors and raters performing foot-on-ground or walking surveys (US) or detailed road inspection or DVI, as known in the UK. The first product in the line, Pavo DVI enables direct digitization in the field through a mobile application producing digital survey maps, formatted data files, and reports. Working with Eurovia UK, Strada Imaging later extended Pavo DVI capabilities by adding local road functionality to the software originally built for highways.

Figure 1. Illustration of Pavo CVI showing the data capture device and software interface
Despite the arrival of expensive automated road inspection technology, observations performed by experienced personnel from moving vehicles remain a robust, fast, and cost-effective approach. Previous studies involving vehicle-based surveys have shown a high degree of inter- and intra-inspector repeatability and correlation[1]. A survey among North American road authorities found that manual inspection is equally used for cracking, raveling, bleeding, patching, and potholes as any other automated and semi-automated method[2]. For certain other defect types such as weathering, manual surveying is the predominant method of inspection even today. Although automated road inspection systems have been widely available for more than a decade, local authorities in the developed world are still struggling with their inability to specify defect definitions for automated inspection. A lack of customization possibilities with automated road inspection systems is another concern. The scope of manual inspection is far greater in the developing world, where automated inspection has not gained much traction, due to cost, regulatory, and capability constraints. This is the global market that the Pavo product line targets.
Vehicle-based road inspection
As mentioned earlier, vehicle-based road surveys provide a fast and effective way to determine the condition of a network. Such a survey typically involves a driver-inspector duo driving and gathering data in a high up driving position vehicle. In addition to being responsible for safe navigation, in the US, the driver also performs a visual survey of the road. During the survey, the vehicle is driven at or under highway speeds (15-40 carriageway km/hr speeds are common in the UK) and the general condition of an entire section is observed. For highly defective sections, it is normal to drive at very slow speeds or to stop altogether and perform a walking inspection. In the UK, the whole carriageway is assessed as one, while kerbs, footways, and cycleways that are next to the carriageway are separately inspected.
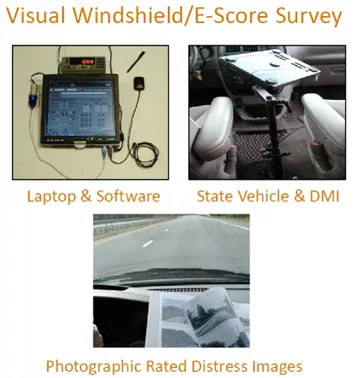
Figure 2. Components of a typical CVI or windshield survey [Courtesy: New York DOT[3]]
Defect data collection in a CVI involves identifying the start and the end chainages of a defect – i.e., the exact location of a defect – along the survey direction. This is typically done with the aid of an odometer. Odometers count wheel rotations and therefore allow for inferring the distance traversed, enabling the inspector to mark the start and end chainages of defects; live odometer readings are available via a standard electronic interface in all modern automobiles. In addition to wheel rotations, the distance travelled by a vehicle is also affected by factors such as its wheel diameter, tyre tread wear, tyre pressure, etc. Some of these parameters can change with time. Hence, a calibration relating the distance travelled by the vehicle per odometer count is performed periodically.
Every recorded defect is defined by the actual start and end chainages. In the UK, these are called variable chainage-related defects, defined by their start and end chainages. However, a defect is bound by the highway section in which it lies, i.e., if a continuous defect spans two successive sections, it will be recorded as two defects instead. The UK system uses the so-called minimal (simple) cross-section position method, and the full cross-section position (XSP) method for classified roads. A conceptually similar, segment-based rating is used in the US, where the rater provides a condition score for a segment based on the frequency and severity of cracking; while also classifying specific distresses, such as fatigue cracking and spalling, as isolated, general, low, or high[4]. UK surveys differentiate the cross-section of the road (Figure 3); the XSP method contains much more cross-sectional divisions.
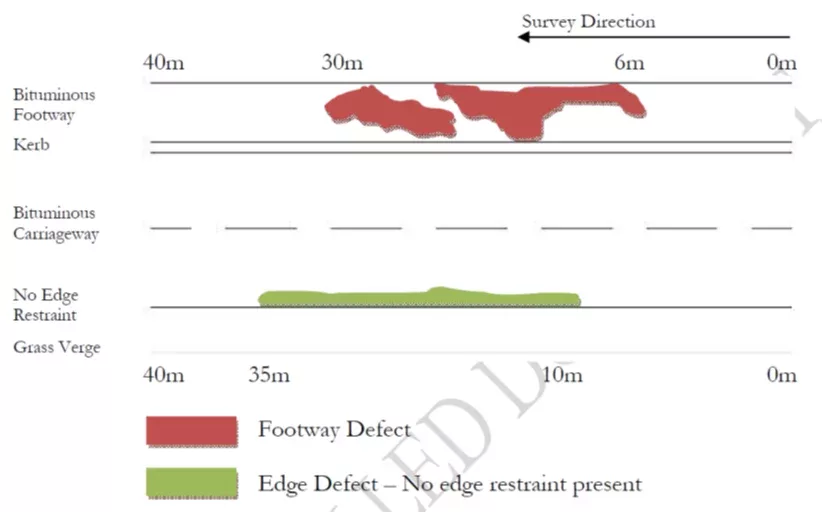
Figure 3. Cross-sections details for the CVI in the UK[5]
Even today, a significant proportion of vehicle-based surveys are paper-based (Figure 4). Here, standard survey templates are printed out and filled out during the survey. Back in the office, these handwritten records are converted to a digital format. Hardware and software solutions have been available for vehicle-based surveys since the early 2000s. Some local authorities, both in the US and the UK as well as road construction contractors use special purpose computers accompanied by proprietary software while others rely on laptops[6]. A taximeter is placed next to the computer using which the user will get distance information (Figure 2; top left).
Present issues with vehicle-based road inspections
Paper-based surveys are quite cumbersome. The inspector in a survey vehicle often performs multiple tasks together such as handling survey sheets, checking the distance traversed by the vehicle, and, sometimes, he or she may be expected to take photographs of the road for future reference. Hence, paper-based surveys are error-prone. Also, paper surveys can be slow since the inspector is often multi-tasking. Whether paper is used or not, relevant stakeholders keep a digital record of their surveys. Digitising is critical because, in addition to storage considerations, digital survey records are also necessary for pavement maintenance planning software prevalent in the industry. Often someone else other than the original inspector, perhaps a younger, less experienced colleague, does the digitising, further aggravating the probability of error.
Direct digitization solutions have been available for vehicle-based surveys for almost two decades. Some road authorities and contractors use special purpose computers which come with their own proprietary software. However, the digitisation technology is today stagnant due to multiple reasons. First, as many of these devices are old and have legacy software (e.g., ones written for old versions of MS Windows) they rarely receive any updates. Second, technical support and product replacement are minimal at best or non-existent. Third, the data collector device, its software, and vehicle odometer interface hardware must all be bought together making these inspection systems expensive. Finally, legacy hardware-software combination, by virtue of being proprietary, also blocks any potential innovation or collaborative development in vehicle-based surveys. For instance, although there is a possibility of exploiting different positioning sensors that are available within modern smart devices to complement vehicle odometer position data for more accurate readings, such a fusion is impossible in legacy inspection systems.
Further, from the usability point of view of a rater, digitisation, as formulated by older road surveying systems, does not entirely remove all their pain points. An inspector will have to simultaneously use the computer in addition to checking the taximeter interface for distance readouts, all the while taking photographs of the road regularly. They must frequently switch between the different devices, scattering their concentration, leading to productivity loss and increasing data entry errors.

Figure 4. A US windshield survey record used by the Oregon Department of Transportation[7]
Features and benefits
Pavo CVI turns the computer-based solution status quo on its head by introducing direct map-based recording. The instantaneous visualisation of data on a roadmap reduces data entry errors.
Android app
Pavo CVI is an Android mobile application presenting an intuitive, easy-to-use interface to the inspector. The software adheres to the latest best practices in software development and distribution, to be made available and updated easily – all from Google Play.
Any device as the DCD, almost!
Users are not tied to any archaic, obsolete computers or DCDs. An Android app brings a clear advantage: the ability to use any Android compatible mobile computing device, including smartphones with large screens, as a data collecting device and user interface.
Custom odometer hardware
Strada Imaging designed the vehicle odometer interface hardware that comes with Pavo CVI in which automotive quality odometer interface electronics, used in taximeters, is integrated with a bespoke embedded system to provide a robust road position estimation solution. This device eliminates the need for a separate taximeter and for a rater to look at taximeter displays for every data point entry. All that an inspector must do with Pavo CVI is tap the touch screen to capture the current vehicle position on the road. Odometer calibration is part of the software and calibration parameters from multiple vehicles can be saved on a given smart device.
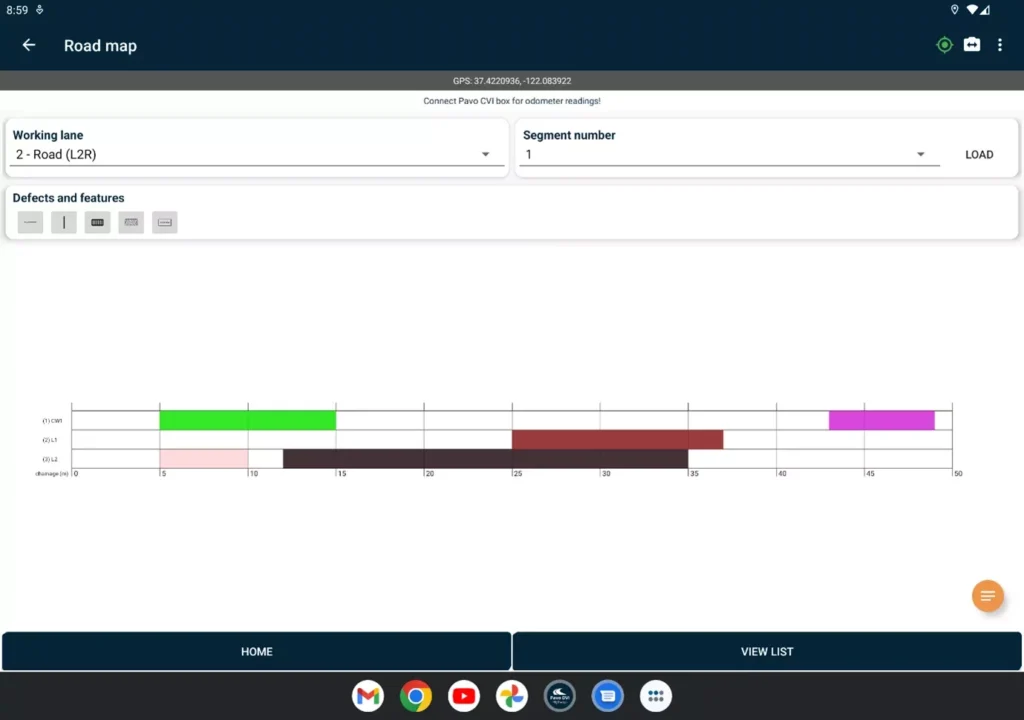
Figure 5. Map based recording in Pavo CVI
Roadmap-centred surveys
Pavo CVI surveys have road maps as the primary element. Every entry is immediately displayed. Project settings allow for flexible multi-lane configurations to be set up, including cycle tracks and footpaths (Figure 5). In addition to the lane on which the vehicle drives, Pavo CVI facilitates inspections from adjacent lanes to be entered into the survey with ease.
Flexible data entry
The app can be used to draw custom shapes, making recording possibilities virtually infinite. Pavo CVI makes it possible to edit and update recorded defects later. Touch-to-edit functionality allows ultra-fast operation. For UK surveys, the app is built with 5 standard UKPMS CVI defect categories: Length, Lane Length, Count, No Defect, and Area.
Use smartphone sensors to your advantage
The software allows the complimentary logging of data from the GPS sensor in the smart device, which can be used to further improve the robustness of measurements. An inspector can take photos from the smart device and attach those to the relevant data entries. Strada Imaging is working on an AI-driven voice-to-text functionality to further speed up the surveys, by reducing touch-centred user interaction and data entry.
Human factors
User ergonomics and efficiency are significantly improved as the user is required to look at just the smart device screenand, of course, the road. There is no need to attach taximeters to the DCD, or to carry separate equipment to take road photos.
Cloud storage of data
Pavo CVI does not need an internet connection to work. Data on the DCD gets automatically backed up in the cloud on the availability of an internet connection. Google cloud data storage provides ultimate flexibility, cyber-security, and prevention of loss of survey data. Another critical feature of the app is a remote viewing functionality that allows a survey to be shadowed remotely, with internet availability. This functionality can be used to train new inspection personnel.
Reporting
The rater can produce a CSV text file, containing defects details, and a PDF report of the survey at the click of a button. For each defect, the reports also contain a URL to any associated photographs – hence no confusion in matching data to images. Once reports and defect detail files are generated, they can be conveniently emailed to anyone from the app.
Further development and customization possibilities
CVI and windshield practice varies between countries and even among different authorities and vendors within a country. Hence it is not possible to cover every variant by one set of features. Having an agile software team, Strada Imaging is uniquely placed to customise the app toward any new function requests.
Field tests
The Pavo CVI with its cutting-edge features gives a fast, accurate and cost saving road inspection. The app is presently undergoing extended user testing at Aston University, having already demonstrated significant time savings on road and in post-processing during its validation testing.
[1] https://rosap.ntl.bts.gov/view/dot/26795
[2] http://nap.naptionalacademies.org/25513/
[3] https://www.dot.ny.gov/divisions/engineering/technical-services/hds-respository/2019__Hwy_Data_5_-_Pavement_Condition_and_Score_Generation_K_Vogel.pdf
[4] https://www.dot.ny.gov/divisions/engineering/technical-services/hds-respository/2019__Hwy_Data_5_-_Pavement_Condition_and_Score_Generation_K_Vogel.pdf
[5] https://www.ciht.org.uk/media/11969/ukpms_manual_02_07v09.pdf
[6] https://ftp.txdot.gov/pub/txdot-info/cst/raters_manual-2010.pdf
[7] https://www.oregon.gov/ODOT/Construction/Documents/gfp_manual.pdf